


Description

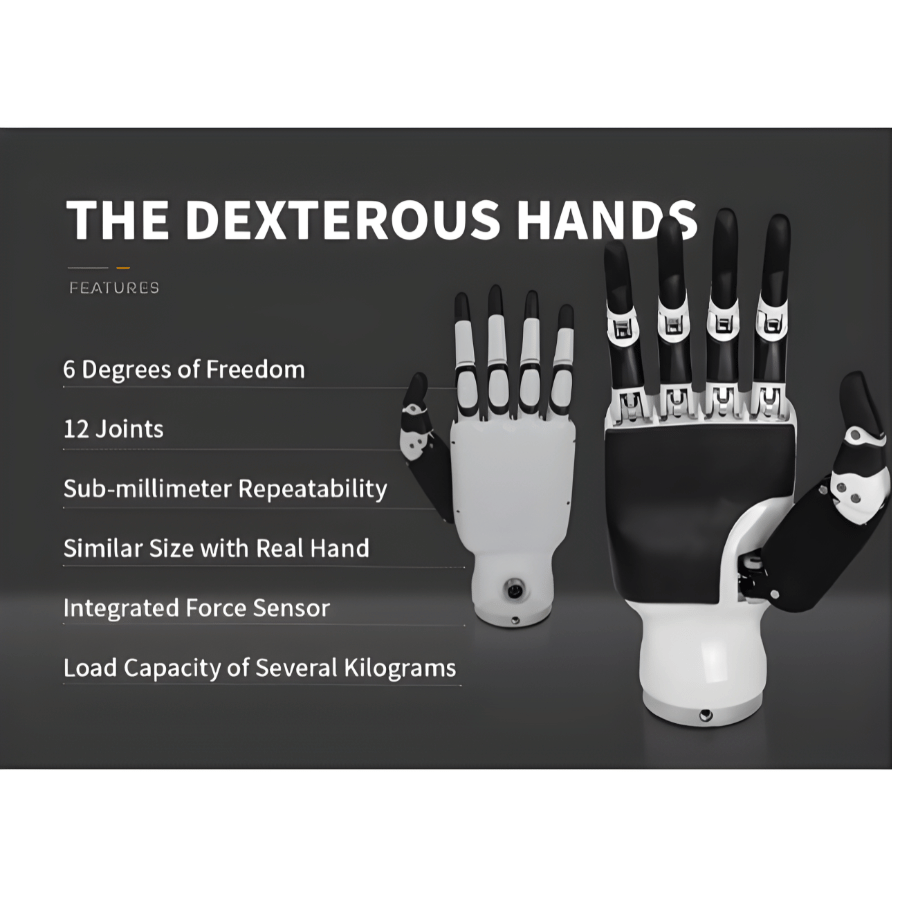
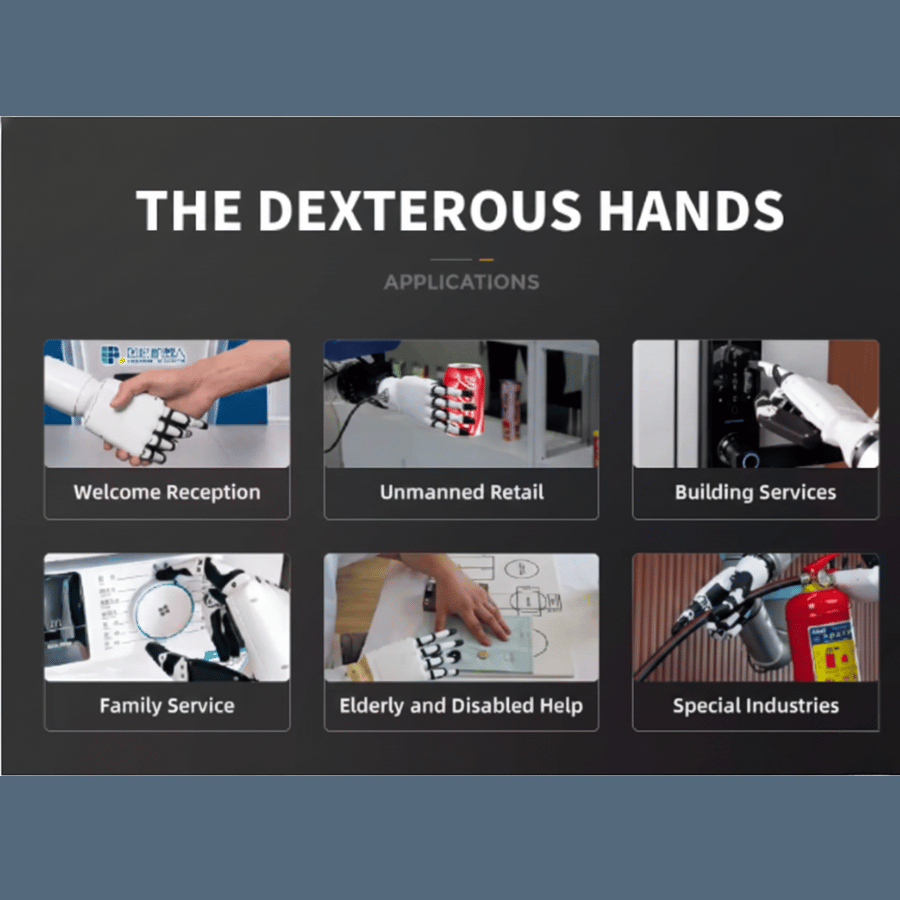
Dexterous Hand – RH56BFX Series Specifications
| Parameter | RH56BFX-2L (Left Hand) | RH56BFX-2R (Right Hand) |
|---|---|---|
| Hand Configuration | Left-hand model | Right-hand model |
| Control Interface | RS485 | RS485 |
| Degrees of Freedom (DOF) | 6 | 6 |
| Number of Joints | 12 | 12 |
| Weight | 540 g | 540 g |
| Operating Voltage | DC 24 V ±10% | DC 24 V ±10% |
| Idle (Quiescent) Current | 0.20 A | 0.20 A |
| Peak Current | 2 A | 2 A |
| Position Repeatability | ±0.20 mm | ±0.20 mm |
| Maximum Thumb Gripping Force | 6 N | 6 N |
| Maximum Finger (Palm) Gripping Force | 4 N | 4 N |
| Force Resolution | 0.50 N | 0.50 N |
| Thumb Lateral Rotation Range | Greater than 65° | Greater than 65° |
| Thumb Lateral Rotation Speed | 235°/s | 235°/s |
| Thumb Bending Speed | 150°/s | 150°/s |
| Finger (Palm) Bending Speed | 570°/s | 570°/s |









There are no reviews yet.