| Product Name |
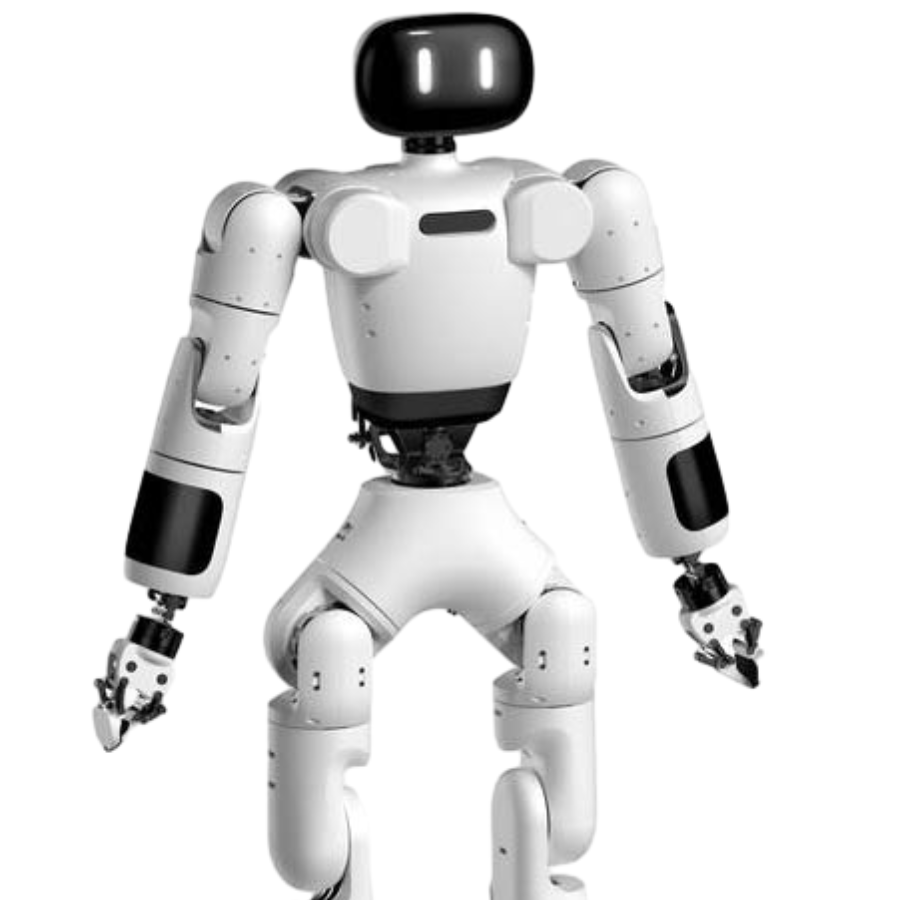
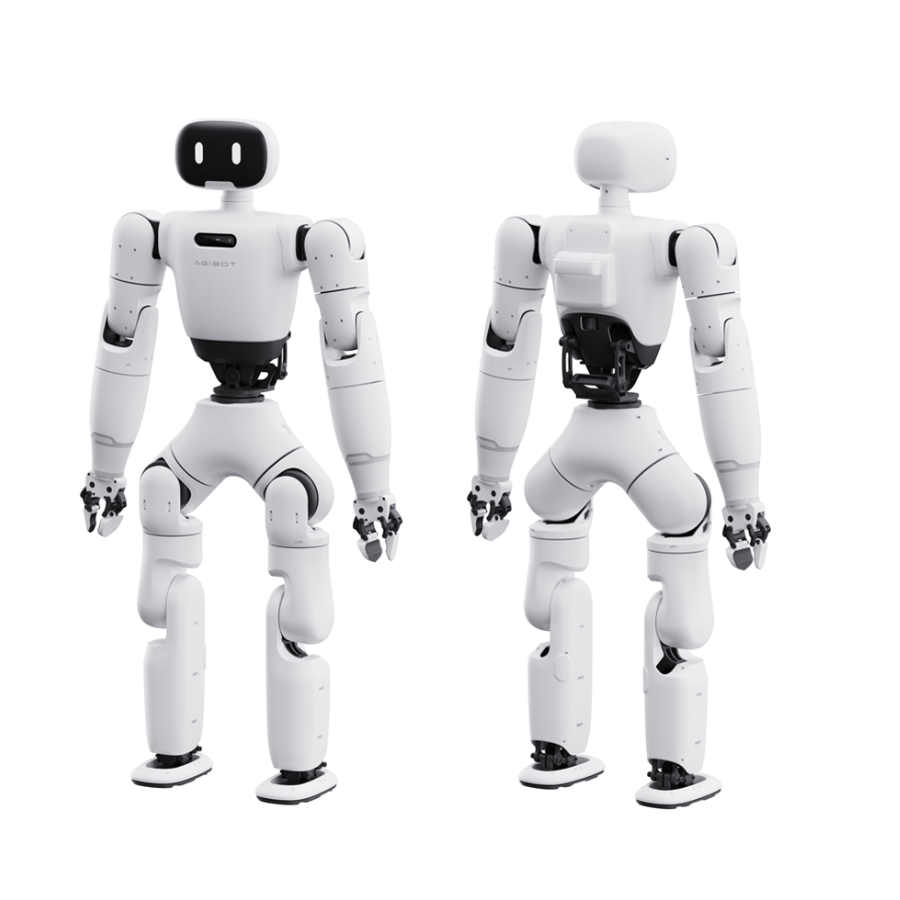
Agibot X1 Full-Stack Open Source Robot |
| Robot Type |
Open-Source Humanoid Robot |
| Structure |
Bipedal humanoid platform |
| Height |
Approx. 140–150 cm |
| Weight |
Approx. 40–50 kg |
| Degrees of Freedom |
30+ DOF |
| Locomotion |
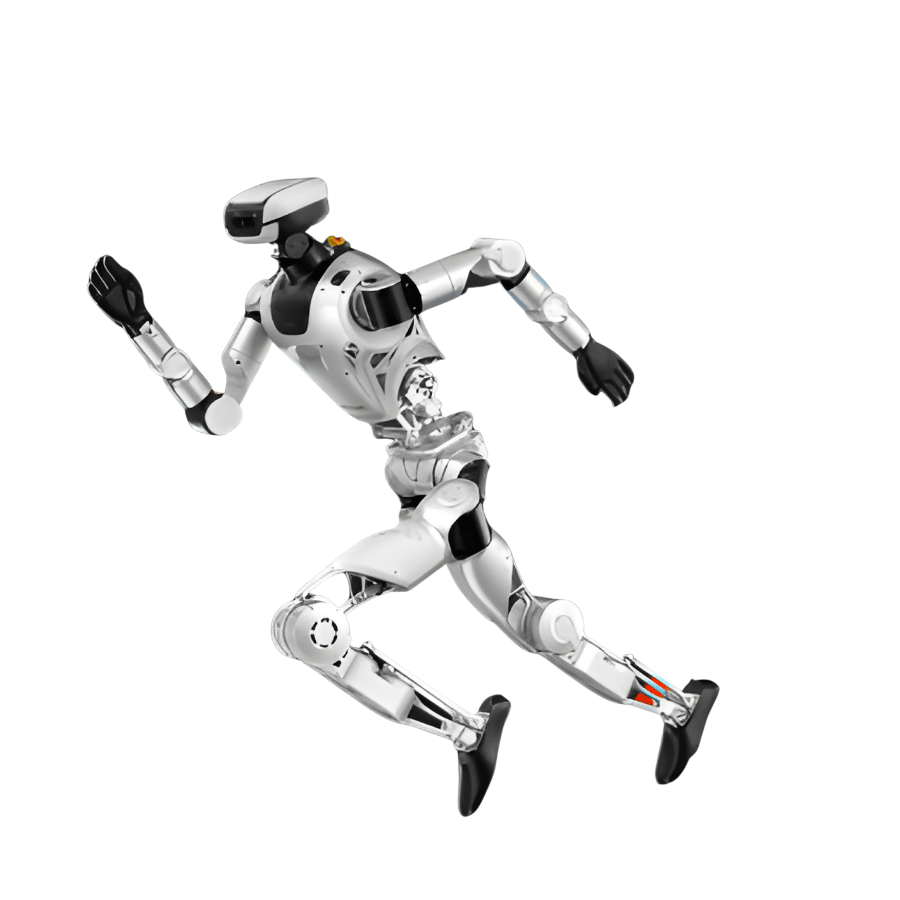
Bipedal walking |
| Arms |
Dual articulated robotic arms |
| Hands |
Multi-finger robotic hands |
| Vision System |
Stereo cameras / depth sensing |
| Sensors |
IMU, force sensors, vision sensors |
| AI Capabilities |
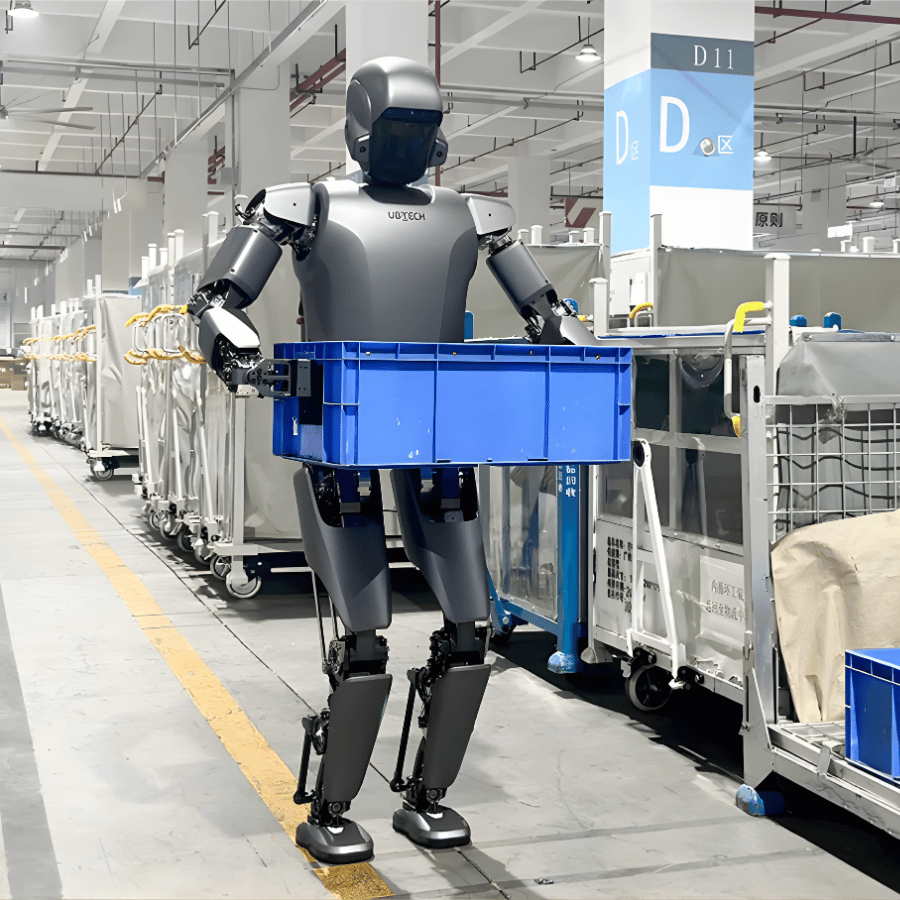
Perception, navigation, motion planning |
| Software |
Full open-source robotics stack |
| OS Support |
Linux-based robotic OS |
| Programming Support |
Python, C++, ROS compatibility |
| Connectivity |
Wi-Fi, Ethernet |
| Power Source |
Rechargeable lithium battery |
| Operating Time |
Approx. 2–3 hours |
| Charging |
Direct charging |
| Materials |
Aluminum alloy frame + composites |
| Operating Environment |
Indoor |
| Primary Use |
Research, education, AI development |
| Customization |
Hardware & software fully customizable |



















There are no reviews yet.