




Description


Ignite the Powerful Motion of Intelligent Agents
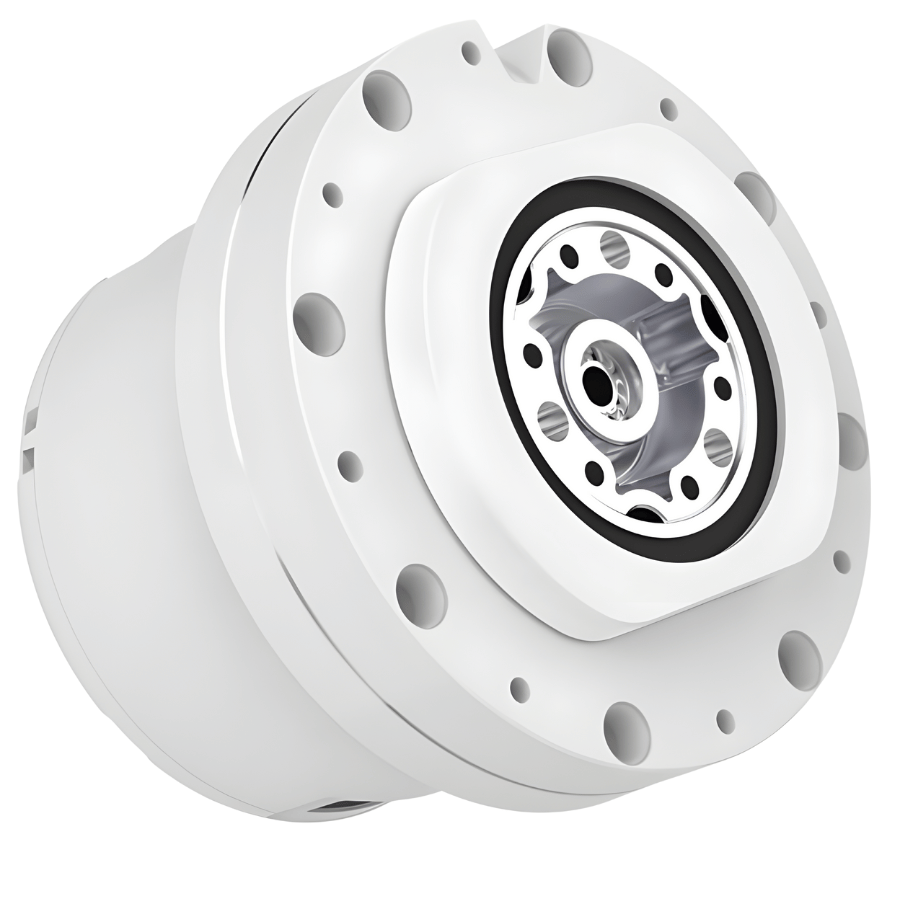
DEEP Robotics’ J60 joints are high-performance robotic actuators that form the core motion system of modern humanoid and quadruped robots. Engineered to deliver exceptional mobility and flexibility, these joints enable smooth, dynamic movement across a wide range of robotic platforms.
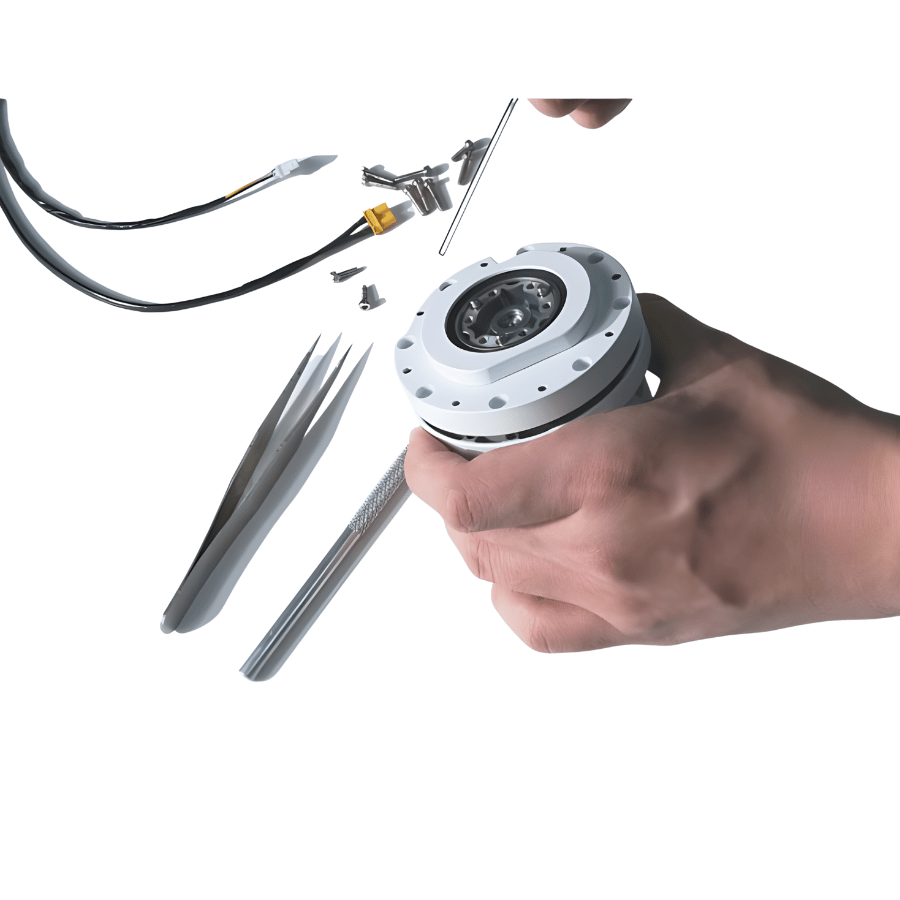
Designed to support diverse robot structures, the J60 joints play a vital role in building embodied intelligent agents, seamlessly bridging artificial intelligence and robotics. Beyond commercial applications, they are widely used in scientific research, education, robot competitions, and DIY robotics projects, making them a versatile and reliable choice for innovators and developers.
Outstanding Performance
The J60 joint delivers exceptional torque output while maintaining a lightweight design. With an industry-leading torque-to-weight ratio of up to 56.48 Nm/kg (J60-10), it empowers robots with strong, responsive motion and superior load-handling capability, making it ideal for high-performance robotic systems.
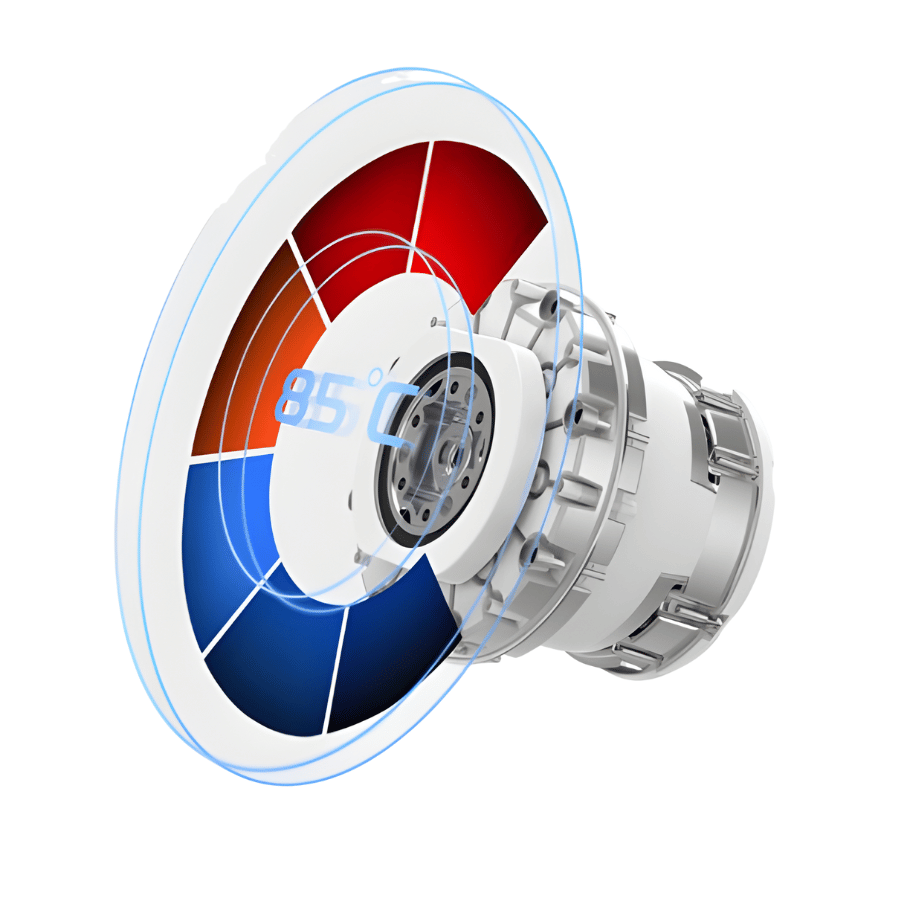
Reliable and Durable Design
Engineered for long-term reliability, the J60 joint meets a wide range of application demands—from quadruped robot motion control to advanced learning and research environments. Its proven durability is demonstrated through successful integration into mature robotic platforms such as the Lite3 quadruped robot, ensuring stable operation and consistent performance in real-world use.



Product Specifications – J60 Robot Joint
| Category | Specification | Details |
|---|---|---|
| Physical Dimensions | Size | 76.5 mm × 63 mm |
| Weight | 480 g | |
| Electrical Parameters | Operating Voltage Range | DC 18 V – 36 V |
| Standard Operating Voltage | DC 24 V | |
| Maximum Motor Phase Current | 30 A | |
| Performance & Torque | Peak Torque | 19.94 Nm |
| Peak Speed | 24.18 rad/s | |
| Joint Torque Constant | 0.8982 Nm/A | |
| Maximum Torque-to-Weight Ratio | 41.54 Nm/kg | |
| Encoder System | Encoder Type | Absolute Encoder |
| Encoder Resolution | 14-bit | |
| Communication Interface | Communication Method | CAN |
| Communication Baud Rate | 1 Mbps | |
| Control Frequency | 1 kHz |










There are no reviews yet.